



|
Титтей оригами роботының ағзаларда қалай жылжитынын, организмде қалай жүзетінін көргіңіз келе ме (видео)
|
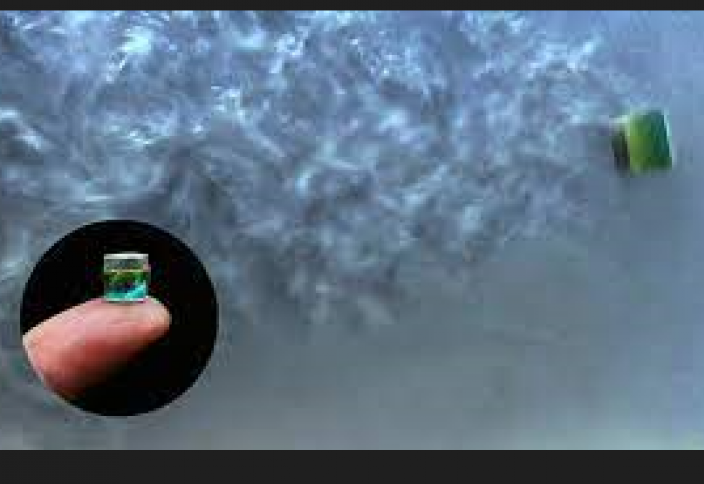
Инженерлер организмнің кез келген ортасында өрмелей, жүзе алатын, дәріні ауру жайлаған жерге жеткізуге арналған сымсыз робот жасады. Бұл жайында islam.kz порталы робот оригамидің сипаты баяндалған Nature Communications мерзімді басылымына сілтеме жасай отырып мәлім етеді. Стэнфорд университетінің инженерлері титтей амфибия роботын құрастырды. Құрылғы Креслингтің оригами схемасының принциптеріне негізделген. Робот магнитті өріс көмегімен жылжиды: айналады, конфигурациясын және бағытын өзгертеді. Бұл роботтың артықшылығы – түрлі ортаға бейімделуінде жатыр. Ғалымдардың айтуынша, қазіргі заманғы миниатюралық оригами роботтарының көпшілігінің кемшілігі - олар қозғалысты басқару және дәрі-дәрмек жеткізу сияқты өз функцияларын орындау үшін бөлек құрылғыларды қажет етеді. «Қосмекенділердің» авторлары өз құрылғысын құрылғының пішіні қозғалысқа ғана жауап бермей, пайдалы тапсырмаларды орындайтындай етіп жасаған. Инженерлер әзірлеген құрылым роботқа «бөлшектелген» күйде әр нәрсенің беткі жағында оңай қозғалуға мүмкіндік береді. Ал мақсатына жеткен «қосмекенді» аккордеондай бүктеліп, дәрі-дәрмекті сығып алады. Ғалымдар атап өткендей, бұл тәсіл құрылғының өлшемін азайтуға, кез келген қосымша модульдерді жоюға мүмкіндік береді. Робот неғұрлым кішірек болса, медициналық процедура соғұрлым аз инвазивті болады, дейді әзірлеушілер. Екінші әмбебап құрылымдық тетік: геометриялық элементтердің қосындысы. Ғалымдар түсіндіріп отырғандай, роботтың ортасындағы бойлық тесік және бүйірлерінде жоғары бұрышта орналасқан бүйір ойықтар суға төзімділікті азайтады және роботтың жақсы жүзуіне көмектеседі. Сондай-ақ, дәл осы тетіктер «жүктемені» сіңіру үшін қолданылады. Аталмыш зерттеуге жетекшілік еткен Стэнфорд университетінің инженер-механигі Рене Шжаудың айтуынша, бұл дизайн роботта жылдам жүзу үшін теріс қысым жасайды және сонымен бірге жүкті тиеу және тасымалдау процесінде соруды қамтамасыз етеді. «Біз осы кішкентай роботтың геометриялық мүмкіндіктерін толық пайдаланамыз және әртүрлі қолданбалар мен функциялар үшін біркелкі құрылымға ұмтыламыз».