





|
Как самому разработать двуногого робота за 100 дней: видео
|

Когда Кабураги перешел от настольных моделей к большой конструкции, он начал помогать роботу удерживать равновесие с помощью импровизированной страховки. При таком подходе двуногое шасси может некоторое время ровно идти или даже бегать, но самостоятельно шагать у него пока не получается — сразу или через пару секунд механизм беспомощно падает. Конечная цель проекта — за 100 дней построить робота ростом около 180 сантиметров, который способен самостоятельно бегать.
Чтобы лучше понимать механику человеческих движений, Такаши даже начал снимать на видео свои пробежки на стадионе. У робота пока еще нет полноценных ступней и приводов на коленные суставы — он двигается за счет пары электромоторов, приводящих в движение «бедра». Очевидно, в следующие 50 дней конструкция будет существенно доработана, но первые успехи уже есть.

Судя по тому, что со временем на творении изобретателя начали появляться некие балансиры, можно надеяться, что проект получится завершить успешно. Однако без какого-либо туловища или его «заменителя» создать шагающего двуногого робота, который двигается прямолинейно, практически невозможно, по крайней мере, имитируя человеческую походку. Дело в том, что когда люди ходят или бегают, они всем своим телом компенсируют вращательный момент, возникающий во время переноса центра масс тела с одной ноги на другую.
Ранее Кабураги прославился в сети создав самособирающийся кубик Рубика, который еще и может висеть в воздухе за счет магнитной левитации:
Напомним, на создание ходящего, бегающего и прыгающего робота Atlas у американской компании Boston Dynamics ушло несколько лет. Но их изделие до сих пор остается экспериментальным и за пределы лаборатории выходит только в рамках демонстраций или испытаний. А коммерческие разработки данной фирмы пока либо четвероногие, либо колесные.
Новый робопёс ведет себя как собака, но его не надо выгуливать
Он быстро движется, подчиняется командам и не оставляет неприятных сюрпризов на полу — познакомьтесь с новым роботом-собакой AlphaDog из Китая.
Высокотехнологичная собака использует датчики и технологию искусственного интеллекта (ИИ), чтобы «слышать» и «видеть» окружающую среду, и ее даже можно выгуливать. «Это действительно очень похоже на настоящую собаку», — рассказывает в интервью агентству «Франс Пресс» Ма Цзе, технический директор Weilan, компании, создавшей этот продукт.
В отличие от Spot, четвероногой машины, разработанной для промышленного использования компанией Boston Dynamics, создатели AlphaDog из Нанкина нацелены на потребительский рынок.
С четырьмя металлическими ногами он более устойчив, чем настоящая собака, отмечают инженеры. Кроме того, он может предсказать трение и высоту земли, чтобы отрегулировать ее высоту, отрегулировать частоту шагов и адаптироваться к окружающей среде.
Его создатели используют технологию 5G для автономной работы робота.
Технический директор Weilan изучал обучение с подкреплением в Оксфордском университете и говорит и использовал эти знания для создания AlphaDog. Так робопес с ИИ научился имитировать собачьи привычки.
Французская армия протестировала робота Spot в учебном бою
Французские военные использовали робота Spot для учебной операции. Устройство замедлило военные действия, но было эффективным в качестве разведчика.
Четырехногого робота компании Boston Dynamics заметили во время тренировок французской армии в военной школе на северо-западе Франции. Об этом сообщили издания The Verge и France Ouest. Он использовался во время двухдневных тренировок с целью «оценки добавленной стоимости роботов в боевых действиях».
Учения были направлены на то, чтобы изменить план действий на случай взаимодействия военных и роботов в будущих боевых ситуациях. Они провели три наступательные и оборонительные миссии, при этом Spot использовали в основном для разведки. Роботами управляли дистанционно, в учениях также участвовал автономный танк OPTIO-X20 с пушкой, и Barakuda — бронированный колесный беспилотный летательный аппарат, предназначенный для укрытия наступающих солдат.
Военные пришли к выводу, что роботы замедлили операцию, но держали войска в безопасности: один солдат сообщил, что он «погиб» в первом упражнении без Spot, но выжил во втором благодаря разведке робота. Однако заряда батареи робота не хватало на все упражнение.
Роботы были предоставлены во временное пользование армии европейским дистрибьютором Shark Robotics и Nexter Group. Однако Boston Dynamics не знали о проведении операции.
Boston Robotics не высказывала свою позицию по поводу использования роботов во время военных операций. Однако устройства компании-конкурента Ghost Robotics уже использовали при патрулировании объектов ВВС США.
Морская звезда-робот поможет изучать глубины океана
Ученые из Лаборатории компьютерных наук и искусственного интеллекта (CSAIL) Массачусетского технологического института (MIT) представили морскую звезду-робота, которая будет изучать устройство глубинных слоев океана. Она не будет мешать рыбам и другим водным обитателям.
Исследователи объяснили, что документирование жизни в океане — это очень сложный и дорогой процесс. В первую очередь потому, что оборудование для этого должно быть прочным, но его конструкция не должна тревожить морских обитателей, которые чувствительны к движениям человека.
В качестве возможного решения ученые разработали нового морского робота. Команда использовала свою систему для создания мягкой роботизированной морской звезды, сделанной из кремниевой пены; устройство может двигаться с помощью одного маломощного моторчика. Звезда движется с помощью сухожилий на конечностях, которые соединены с сервоприводом.
Исследователи выбрали дизайн звезды из-за простоты и элегантности движений. Тем не менее, в будущем они хотят создать таких же роботов с другим строением тела — которые вдохновлены организмом морских черепах, скатов, акул. Они будут включать в себя суставы, плавники и ласты.
Ученые сначала построили учебную модель, которая выполняет первоначальную симуляцию и проектирование механизмов управления роботом, затем быстро изготавливался и сам прототип. Исследователи позже проводили эксперименты с роботом, чтобы получить больше данных для усовершенствования и оптимизации его конструкции. В результате робота, как правило, приходится переделывать только один раз.
«При моделировании робота нам приходится делать изменения, которые, по определению, создают разрыв между симуляцией и реальностью, — отметили ученые. — Наша дальнейшая работа направлена на сокращение этого разрыва между реальностью, со смешанным циклом имитационных и реальных экспериментов, которые, как нам показалось, достаточно эффективны».
Ловкий робот-змея научился плавать под водой и обследовать корабли
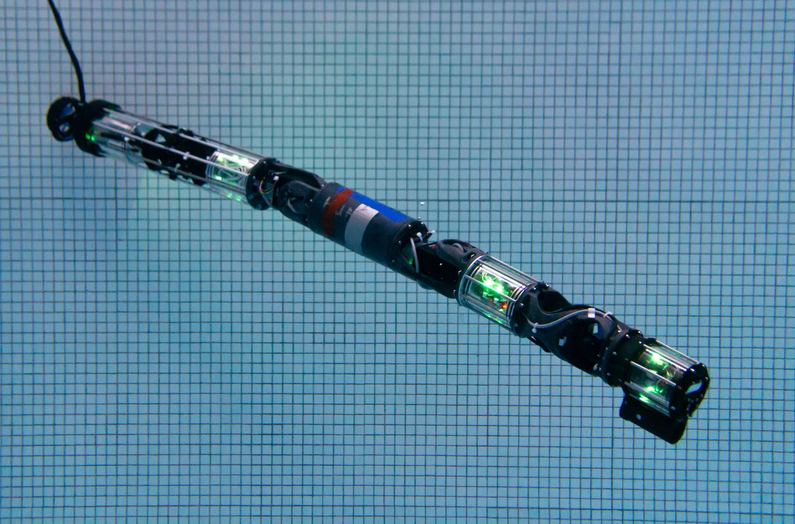
Лаборатория биоробототехники в Университете Карнеги — Меллона (CMU) обучила своего змееподобного робота HUMRS плавать под водой.
Знаменитый змееподобный робот теперь может скользить и под водой. Его можно будет использовать для проверки состояния кораблей, подлодок и инфраструктуры под водой, говорят исследователи.
В прошлом месяце ученые из Института робототехники CMU протестировала закаленного подводного модульного робота-змея (HUMRS) в университетском бассейне. Тест показал точное и плавное движение под водой, а также высокую степень контроля.
Погружной робот-змея был разработан на грант Института передовой робототехники для производства (ARM). По словам Мэтта Фишера, руководителя программы института ARM, работающего над проектом, его целью является помощь министерству обороны США в проверке кораблей, подводных лодок и другой подводной инфраструктуры на предмет повреждений или в рамках планового технического обслуживания.
По словам авторов разработки, HUMRS может отправиться в места, недоступные другим роботам.
Обычно военные отправляют для проверки команду водолазов либо заводят судно в сухой док. Оба эти мероприятия достаточно дорогостоящие и требуют временных затрат. Подводный робот мог бы оперативно осматривать корабль, немедленно предупредив экипаж о критических повреждениях или отправив информацию о проблемах в порт.
Двуногий робот учится ходить, используя обучение с подкреплением
Группа исследователей из Калифорнийского университета в Беркли построила двуногого робота. Он сам учится ходить, используя обучение с подкреплением. Инженеры написали статью с описанием своей работы и загрузили ее на сервер препринтов arXiv.
Работа заключалась в создании двуногого робота. Его пара конечностей соединена вместе небольшой удерживающей рамой. Сейчас робот, которого авторы назвали «Кэсси», выполняет свои задачи привязанным к раме, которой руководит один из исследователей. По сравнению с другими роботами, например, с разработками Boston Dynamics, «Кэсси» кажется примитивным. Однако он представляет собой передовую технологию нового типа, в которой робот сам учится ходить без прямого программирования или имитации.
Как учатся ходить люди? Используя обучение с подкреплением! Младенцы приобретают этот навык, пробуя новые движения. Они не понимают весь процесс сразу, но запоминают шаги, которые приводят к ходьбе. А затем опираются на то, что узнали, добавляя дополнительную информацию, которая в конечном итоге приводит к правильной ходьбе. При этом дети не останавливаются на достигнутом; они продолжают учиться, и их походка становятся лучше. Со временем дети осваивают новые приемы — как бег и прыжки.
Чтобы помочь роботу научиться ходить таким же образом, исследователи начали с его моделирования в виртуальном мире. Он обучен с помощью информации, а ИИ запоминает и использует ее. Моделирование позволило роботу научиться ходить, не повреждая оборудование.
Как только робот научился ходить в симуляции, исследователи передали его знания «Кэсси», которая использовала их для ходьбы, как у младенцев. И, как малыш, она совершенствовала свои навыки. Она научилась не падать при небольшом скольжении или восстанавливаться, когда ее толкают сбоку. Кроме того, ей удалось научить компенсировать ущерб, когда оба ее двигателя повреждены. Исследователи планируют продолжить свою работу с обучением с подкреплением в роботах, чтобы увидеть, насколько далеко они могут зайти.
Роботам сделали слух, который вдохновлен устройством летучей мыши
В новой модели роботов сделали слух, который вдохновлен устройством организма летучих мышей. Теперь они ориентируются в пространстве намного лучше.
Исследователи объяснили, что летучие мыши очень точно могут определять местоположение звука. Поэтому они разработали систему определения ее местоположения, которая сочетает ушную конструкцию, похожую на раковину летучей мыши, с глубокой нейронной сетью для точного определения звуков в пределах половины градуса. При этом человеческие уши могут определять звук с погрешностью в 9 градусов, а новая система — 7,5 градусов.
Систему установили во внешнем ухе, создавая доплеровский сдвиг, связанный с источником звука. Команда обучила нейронную сеть, чтобы обеспечить направление источника для каждого принятого эхо. И, в отличие от систем, вдохновленных человеком, ей нужен только один приемник и одна частота.
Эту технологию пока нельзя применить в настоящих роботах, но ученые уже видят, как технология помогает им ориентироваться в сложных пространствах. Например, они сделали роботов для фермеров, которые собирают урожай с высокой точностью, мониторы биоразнообразия и военные устройства, которые перемещаются по сложной местности с небольшим количеством данных.
Ранее змееподобного робота научили скользить и под водой. Его можно будет использовать для проверки состояния кораблей, подлодок и инфраструктуры под водой, говорят исследователи.





