







|
Роботы должны потеть: нюансы странной технологии
|
Международная команда исследователей научила роботов потеть, чем существенно повысила их эффективность при работе даже в самых тяжелых условиях.
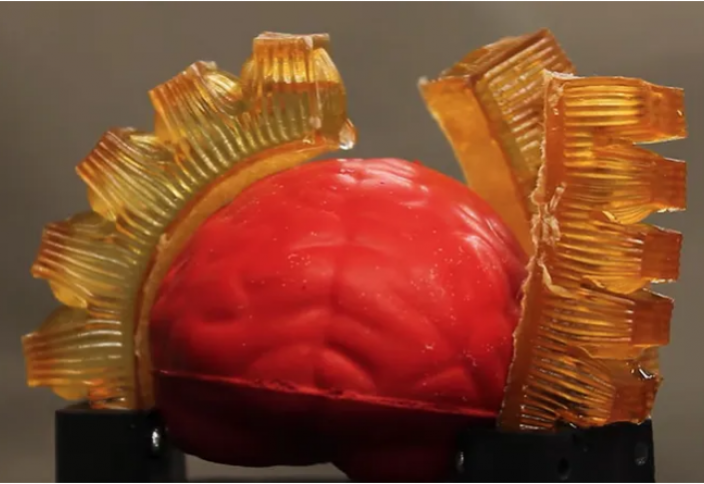
Международная группа ученых разработала мягкую роботизированную руку, которая буквально потеет в ответ на избыток тепла. Эта инновационная концепция может повысить долговечность и выносливость роботов, а также позволить им работать в экстремальных условиях.
Мягкая, потная рука робота – это результат весьма необычного исследования, сведения о котором были опубликованы в Science Robotics. Разработанные исследователями из Университета Корнелла, Facebook Reality Labs и Центра микробиоброботики в Пизе, роботы поддерживают стабильную температуру тела, выделяя пот через крошечные поры. Пускай это лишь пробный образец, однако в будущем на его основе можно будет создать роботов, способных работать в течение продолжительных периодов времени без риска перегрева.
Зачем потеют роботы
Эволюция приспособила наше тело к перепадам температуры весьма изящным способом, посредством выделения избытка жидкости. Способность потеть, как бы странно это ни звучало, является одним из самых важных факторов, обеспечивающих выживание человечества как вида. Сочетание потливости, отсутствия густой шерсти и вертикальной ориентации тела с опорой всего на две конечности позволяло охотникам древности буквально загонять добычу преследованием на дальние дистанции.
Профессиональные марафонцы могут терять до 3,5 литров жидкости в час во время забега. При этом они расходуют около 2,4 кВт энергии – то есть расход больше, чем у большинства бытовых приборов. В дополнение к этому, испарение влаги также может понижать температуру объектов в окружающей среде и улучшать проводимость. Это и подтолкнуло ученых к созданию нового поколения потеющих роботов.
Как это работает

Робот, сделанный из роботов, движется без помощи человека
Хорошие новости: есть способ создавать больших роботов из роботов поменьше. Такие боты могут перемещаться даже в том случае, если их отдельные части на это не способны.
Для начала инженеры создали несколько роботов размером с iPhone и назвали их «смартиклами» (сокр. от smart particles, «умные частицы»). Они могут поднимать и опускать миниатюрные конечности, но при этом не способны двигаться с места на место. Пять таких смартиклов были закреплены на пластиковом кольце, образовав тем самым «супермакет» — простую конструкцию, которая может перемещаться сама по себе в случайных направлениях при столкновении ботов друг с другом.
После этого команда написала алгоритм, который позволял данной конструкции двигаться к источнику света, соблюдая направление движения. Все дело в том, что каждый бот снабжен датчиком света, который заставляет его прекратить движение, когда световое излучение достигает определенной яркости. Когда роботы на переднем крае перестают двигаться, задние все еще толкают их вперед — так супермакет движется к своей цели.
Исследователи предположили, что понимание того, как «умные» боты движутся вместе без центрального пульта управления, может помочь ученым разработать сложные роботизированные системы нового поколения. В будущем они смогут функционировать даже в случае поломки одной детали, и однажды могут быть даже использованы для создания гуманоидного робота, состоящего из множества крошечных независимых частей.
Новая разработка помогла роботам двигаться за счет собственной энергии
Исследователи из Массачусетского университета в Амхерсте спроектировали роботов, которые самостоятельно передвигаются на основе энергии, которую они добывают из окружающей среды.
Многие растения и животные, особенно маленькие, используют специальные части тела, которые действуют как пружины: они помогают им двигаться очень быстро. Такие растения, как венерианские мухоловки, являются хорошими примерами такого рода движений.
Эл Кросби, профессор полимеров и инженерии в Колледже естественных наук МТИ
Однако большинству этих щелкающих устройств нужен мотор или помощь человека, чтобы продолжать двигаться. Однако в новой работе авторы создали приложение, которое не потребует батарей или двигателей.
Изучив основные физические свойства этих систем, команда экспериментировала с различными формами, чтобы найти те, которые будут правильно реагировать и двигаться без какой-либо помощи.
Команда показала, что с помощью измененных пружин робот может самостоятельно подниматься по лестнице.
Это показывает, как материалы могут генерировать мощное движение, используя взаимодействие с окружающей средой, например, через испарение. Это важно для разработки новых роботов, особенно небольших размеров, в которых трудно разместить двигатели, батареи или другие источники энергии.
Собакообразный робот Spot научился самостоятельно заряжаться от док-станции (2 видео)
Компания Boston Dynamics проводит очередную модернизацию знаменитых роботов-псов Spot и выводит на рынок модель Enterprise Spot, предназначенную для проведения долговременных автономных работ промышленного назначения.
Основное отличие промышленного робота Enterprise Spot от выпущенных в продажу летом 2020 года потребительских моделей, заключается в возможности длительной автономной работы и самостоятельного пополнения энергии с помощью специальной станции. Промышленный робот Enterprise Spot будет оснащаться специальным разъемом для самостоятельной зарядки и док-станцией, через которую и будет поступать энергия к роботу.
Технология подзарядки Enterprise Spot достаточно проста и не сильно отличается от подзарядки роботов-пылесосов. После выполнения работы в автономном режиме (около 90 минут) робот возвращается к док-станции и подсоединяется к ней с помощью двух зарядных конусов, на которые Enterprise Spot «ложится животом». Такая функция продлевает время автономной работы собакообразного робота практически до времени выработки его ресурса. Позиционирование для подзарядки осуществляется с помощью «реперных маркеров» размещенных за задними лапами Spot и работающих по принципу QR-кодов.
В промышленных моделях Enterprise Spot также реализована и система удаленного управления Scout, позволяющая с помощью связи через интернет в реальном времени руководить роботом и ставить ему различные задачи. По заявлению разработчиков, для контроля робота требуется всего пару мегабит.
Используя платформу Scout, оператор получает доступ к видеотрансляции с камер Enterprise Spot и может выполнять несколько манипуляций. Работа оператора напоминает компьютерные игры от третьего лица. Используя камеры робота, оператор видит окружающее пространство с борта Spot и может управлять им одним кликом по своему экрану в точке, куда надо переместиться.
Беспроводная связь с Enterprise Spot осуществляется через встроенный двухдиапазонный модуль Wi-Fi. Во время подзарядки на док-станции робот-пес сможет подключиться через разъем Ethernet к высокоскоростному интернету для передачи собранных данных.
Наряду с промышленным роботом Boston Dynamics демонстрирует и манипулятор, который уже выпускается серийно и сможет значительно расширить возможности Spot любой модификации. Рука собакообразного робота способна поднимать предметы массой 11 кг (в полностью распрямленной «руке» - не более 5 кг). Волоком по горизонтальной поверхности манипулятор сможет транспортировать предметы массой до 25 кг. В механизм захвата манипулятора встроена камера 4K и ToF-сенсор.
В США создана печатная установка, производящая простейших роботов (видео)
Производство простейших роботов и дронов полностью передается в «руки» автоматизированных систем. Будущее, когда для создания новых роботов не требуется присутствие человека, уже наступило. Исследователи из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института создали установку способную самостоятельно печатать работающие модели роботов или беспилотных ЛА. Установка получила название LaserFactory и базируется на системе автоматического проектирования устройств и лазерного резака, осуществляющего собственно производство робототехники.
Пользователи могут проектировать устройство с компонентами из библиотеки, добавлять схемы (электрические линии на печатной плате) и вносить некоторые изменения в 2D-редакторе. Это одно из ограничений новой машины - способной создавать только роботов на двухмерной основе. После проверки проекта на соответствие техническим требованиям, программа отправляет инструкции на оборудование LaserFactory. Наряду с лазерным резаком в систему входит устройство, которое печатает схемы и собирает компоненты.
Процесс создания дрона показан на демонстрационном видео. Сначала на пластике намечаются контуры дрона и места установки деталей. Для связи между компонентами, на пластике формируются токопроводящие дорожки, которые после обработки лазером становятся устойчивыми к внешним воздействиям. На следующем этапе готовый дрон попросту вырезают из листа пластика. Вся операция достаточно проста и эффективна, а использовать дрон можно уже через несколько секунд после завершения работ.
Создание таких простейших роботов в больших количествах может потребоваться для оперативного осмотра мест катастроф или труднодоступной местности. Также такие устройства станут объектом учебного процесса, позволяющего быстро проектировать и изменять параметры прототипов на лабораторных занятиях.
Дальнейшее усовершенствование системы LaserFactory позволит создавать полноценных трехмерных роботов, а также повысить точность при печати проводящих дорожек, что позволит устанавливать сложные схемы. Результатом может стать полная автоматизация процесса создания роботов.
Источник: engadget
Роботу вживили ухо саранчи вместо обычного датчика звука
Электрические сигналы нового компонента в режиме реального времени передавались роботу, который был запрограммирован на разные реакции. Например, звук однократного хлопка в ладоши заставлял робота двигаться вперед, а звук двух хлопков — назад.

По словам ученых, аналогичным образом мы можем использовать преимущества естественных датчиков, экономя ученым некоторое время на разработку всей системы с нуля, которая при этом еще и будет на порядок хуже живого органа.
«В целом биологические системы имеют огромное преимущество перед технологическими системами — как с точки зрения чувствительности, так и с точки зрения потребления энергии», — уверен Бен Маоз, автор исследования. «Новая инициатива открывает дверь интеграции между роботами и насекомыми посредством сенсорного восприятия и может сделать излишними гораздо более громоздкие и дорогостоящие разработки в области робототехники».





