

|
Ученые создали потеющих роботов (видео). Новая способность позволит роботам держать вещи, не касаясь их
|
Международная группа ученых разработала мягкую роботизированную руку, которая буквально потеет в ответ на избыток тепла. Эта инновационная концепция может повысить долговечность и выносливость роботов, а также позволить им работать в экстремальных условиях.
Мягкая, потная рука робота — это результат весьма необычного исследования, сведения о котором были опубликованы на днях в Science Robotics. Разработанные исследователями из Университета Корнелла, Facebook Reality Labs и Центра микробиоброботики в Пизе, роботы поддерживают стабильную температуру тела, выделяя пот через крошечные поры. Пускай это лишь пробный образец, однако в будущем на его основе можно будет создать роботов, способных работать в течение продолжительных периодов времени без риска перегрева.
Международная группа ученых разработала мягкую роботизированную руку, которая буквально потеет в ответ на избыток тепла. Эта инновационная концепция может повысить долговечность и выносливость роботов, а также позволить им работать в экстремальных условиях.
Мягкая, потная рука робота — это результат весьма необычного исследования, сведения о котором были опубликованы на днях в Science Robotics. Разработанные исследователями из Университета Корнелла, Facebook Reality Labs и Центра микробиоброботики в Пизе, роботы поддерживают стабильную температуру тела, выделяя пот через крошечные поры. Пускай это лишь пробный образец, однако в будущем на его основе можно будет создать роботов, способных работать в течение продолжительных периодов времени без риска перегрева.
Зачем потеют роботы
Эволюция приспособила наше тело к перепадам температуры весьма изящным способом, посредством выделения избытка жидкости. Способность потеть, как бы странно это ни звучало, является одним из самых важных факторов, обеспечивающих выживание человечества как вида. Сочетание потливости, отсутствия густой шерсти и вертикальной ориентации тела с опорой всего на две конечности позволяло охотникам древности буквально загонять добычу преследованием на дальние дистанции.
Профессиональные марафонцы могут терять до 3,5 литров жидкости в час во время забега. При этом они расходуют около 2,4 кВт энергии — то есть расход больше, чем у большинства бытовых приборов. В дополнение к этому, испарение влаги также может понижать температуру объектов в окружающей среде и улучшать проводимость. Это и подтолкнуло ученых к созданию нового поколения потеющих роботов.
Как это работает

Мягкие пальцы робота обладают изрядной гибкостью
Чтобы изготовить такого бота, исследователи распечатали на 3D-принтере специальные жидкостные приводы, изготовленные из гидрогелей. Их нижний слой удерживал в себе довольно большое количество воды, которая поглощала тепло по мере заполнения. Верхние же слои были снабжены микропорами, которые позволяли выталкивать жидкость по мере необходимости.
Все это стало возможно преимущественно благодаря материалу под названием поли-N-изопропилакриламид (PNIPAm). Он способен реагировать на температуру, так что роботу не нужны дополнительные датчики. В результате робот буквально потел лишь тогда, когда его системам требовалось дополнительное охлаждение, не расходуя на это лишнюю энергию.
В ходе испытаний роботы подвергались воздействию сильного ветра. Это позволило выяснить, что потеющие детали охлаждались в шесть раз быстрее, чем их стандартные аналоги. Более того, ученые уверяют, что способность к терморегуляции у их изобретения намного выше, чем даже у животных. Охлажденные потом руки, к примеру, могли манипулировать даже очень горячими предметами без риска ожога.
Потные проблемы
Конечно, существует и ряд ограничений. В частности, пот делает манипуляторы робота скользкими (кто бы мог подумать), что затрудняет осуществление тонких операций. Кроме того, жидкость в теле бота могла попросту закончиться, после чего тот начинал испытывать ощутимые проблемы. В настоящее время исследователи ищут решение этих и ряда других проблем. Они уже сообщили, что наиболее удобным способом восполнения жидкости для робота будет подключение его к заправочной станции — только вместо топлива и электричества в ней будет простая вода.
В Китае создан робот, лазающий по отвесным стенам
Группа исследователей Чжэцзянского университета в Китае придумала приспособление, позволяющее роботам или людям карабкаться по стенам. При помощи вакуумных присосок, надеваемых на руки, можно взбираться даже по отвесным, неровным поверхностям — почти как ящерица или Человек-паук.
По словам инженеров, все существовавшие до сих пор устройства позволяли лазать только по глади, например, по стеклу или мрамору. Любое прикосновение к шероховатости приводило к утечке вакуума — в результате присоски отваливались.
Китайские ученые прибегли к так называемому ZPD-методу, пишет Phys.org. По краям присосок циркулирует вода, что позволяет поддерживать равномерное уплотнение в центре, а на границах — сохранять атмосферное давление.
"Как показали эксперименты, на шероховатых поверхностях ZPD-устройство весом 0,8 кг генерировало силу всасывания 245 H и потребляло менее 400 Вт", — сказали исследователи. Обычной присоске такого же размера из-за сильного подсоса воздуха потребуется вакуумный насос, который потребляет несколько киловатт и вест десятки килограммов.
На следующем этапе инженеры намерены сделать свое приспособление полностью автономным, а также сократить уровень расхода воды — тогда робот сможет нести собственный резервуар и не подключаться к вешнему источнику. Его можно будет привлекать к чистке окон, строительным, спасательным и другим работам, которые выполняются на опасной высоте.
Новая способность позволит роботам держать вещи, не касаясь их
Устройство состоит из массива крошечных динамиков, которые излучают звук в определенных частотах и объемах. Они создают своего рода волну направленного давления, которая может удерживать объект, поднимать его или, если давление исходит из нескольких направлений, удерживать его на месте, а также перемещать по разным осям.
Этот вид «акустической левитации», как его называют, не совсем новый. Достаточно вспомнить про басы на акустических колонках, где легко может быть подвешен теннисный шарик. Но Марсель Шук и его команда из Швейцарской высшей технической школы Цюриха показывают, что подобное портативное устройство может легко найти место в процессах, где крошечные объекты должны очень легко удерживаться объектами помассивнее. К примеру, роботами.
Например, маленький электрический компонент или крошечная смазанная шестерня, или подшипник для часов, или микроробот в идеале должны удерживаться без физического контакта, поскольку любой контакт может испачкать маленький объект. Даже если
роботизированные захваты справляются с этой задачей, они должны быть чистыми или изолированными, а это не всегда выполнимо. Акустические манипуляции, в противовес этому, запачкать невозможно.
Проблема заключалось лишь в том, какая именно комбинация частот и амплитуд необходима для подвешивания конкретного объекта в воздухе. Таким образом, большая часть работы по совершенствованию технологии заключалась в разработке программного обеспечения, которое могло бы само легко настраивать волны для работы с предметами. И это удалось.
Теперь Шук планирует опросить различные отрасли промышленности, чтобы увидеть, где можно применить ультразвуковой захват. Начал он с часового дела, традиционного для Швейцарии. Там как раз маленькие детали, остро чувствительные к прикосновениям. «Зубчатые колеса, например, сначала покрывают смазкой, а затем измеряют толщину этого смазочного слоя. Даже самое слабое прикосновение может повредить тонкую пленку смазки», — указывает он в пресс-релизе школы.
Как бы часовой мастер использовал такую роботизированную руку? Как бы поступил конструктор микроскопических роботов или биохимик? Потенциал технологии ясен, но не обязательно очевиден. К счастью, ученому выделили научную стипендию на решение этих вопросов. Шук надеется открыть новый стартап уже в следующем году.

Учёными создан «мягкий» плавающий робот из светочувствительного геля
Исследователи из Калифорнийского университета и Калифорнийского института наносистем разработали плавающего робота на основе самоподдерживающегося генератора из гидрогеля. Этот робот, представленный в статье, работает при постоянном подводе света без батареи, сообщает 10 сентября TechXplore.
Учёные разработали мягкий генератор из светочувствительного мягкого геля, который отливается в форме столба или полоски. При попадании света на часть его поверхности, он поглощает свет, мгновенно нагревается и реагирует, сжимаясь. При этом полоска сама закрывает свет, происходит охлаждение, и гелевый столбик распрямляется. Этот процесс повторяется циклически и с большой скоростью, в результате чего колебательное движение продолжается до тех пор, пока не прекращается воздействие света.
Эта уникальная особенность движения по направлению к источника света имитировала фототаксис (двигательная реакция в ответ на световой стимул) живых существ, таких как планктон или мотыльки.
Поскольку гелевая стойка сделана однородной по составу и геометрически симметричной, она способна реагировать на свет с произвольных направлений. Осциллятор обладает почти бесконечными степенями свободы, что является важным преимуществом для робототехники.
Исследователи создали плавающего робота с телом, плавающим на поверхности воды, а хвостом ниже ватерлинии, чтобы убедиться в эффективности применения этого принципа. Они обнаружили, что, когда свет падает на хвост робота, он колеблется вверх и вниз, в конечном итоге заставляя робота уплыть от света.
Преимущество «мягкого» робота заключается в простоте его конструкции, как считают учёные. Робот полностью изготовлен из однородного гидрогеля, что чрезвычайно упрощает и удешевляет его производство.
Поскольку принцип реализации робота является очень общим и широко применимым, генератор может быть изготовлен из многих материалов.
Исследователи считают, что ими «открыт новый универсальный принцип генерации колебательного движения с помощью природного источника энергии». Такая методология позволяет искать материалы, чувствительные к другим стимулам, в зависимости от типа энергии, которую желательно получить.
Теперь учёные планируют продолжать эксперименты с разными материалами, изучая круг применения и более широкий спектр возможных источников воздействия.
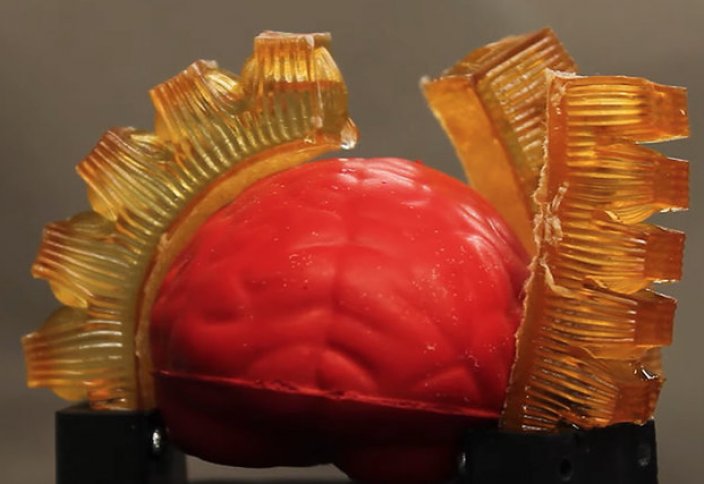
Учёные создали робота, способного перемещаться по сосудам головного мозга
Учёные разработали робота размером в полмиллиметра, способного перемещаться по самым узким сосудам и даже проводить операции. Об этом 28 августа сообщает Science.
Инженеры Массачусетского технологического института озаботились созданием компактного робота, способного перемещаться внутри тела человека. Созданный аппарат состоит из ферромагнитных частиц, распределённых в мягкой полимерной матрице. Магнитное поле, включаемое дистанционно, заставляет частицы двигаться, а вместе с ними приводит в движение робота. Чтобы справиться с трением, возникающим при движении, на поверхности робота была выращена оболочка гидрогеля из гидратированных сшитых полимеров.
Робот может перемещаться по узкой и извилистой сети кровеносных сосудов, например, по сети сосудов головного мозга, в том числе пораженных аневризмами (выпячиванием сосудов). Аппарат может быть снабжён функциональными устройствами терапии. Так учёные демонстрируют возможность оснащения своего миниатюрного устройства лазером, с помощью которого можно будет провести операцию.
Напомним, ранее ИА REGNUM сообщало, что в США специалисты Бостонской детской больницы разработали гибкий автономный роботизированный катетер, который способен самостоятельно ориентироваться внутри сердца и достигать сердечных клапанов.
Американские исследователи пытаются создать роботов-насекомых
Небольшие роботы привлекают внимание представителей государственных и частных организаций. Например, служба по управлению перспективными исследовательскими проектами работающая на министерство обороны США (DARPA) приступила к разработке малогабаритных, роботизированных помощников.
Миниатюрные роботы нужны американцам для устранения последствий связанных с природными катаклизмами и иными типами бедствий. Разрабатываемых нано-роботов назвали SHRIMP, они будут по размерам меньше насекомых и при этом смогут корректировать свое движение, летать, поднимать грузы, анализировать пространство, прыгать и совершать иные динамичные и разведывательные действия.
Разработчиков SHRIMP поделили на три раздельные команды. Два коллектива придумывают элементы для роботов и источники питания, а последний коллектив осуществляет производство деталей. Разработчики планируют разработать миниатюрных помощников за три года.
На конечной стадии разработки происходит объединение всех команд и начинается создание финального продукта. Руководители проекта решили разделить разработчиков на команды для того, чтобы была конкурентная среда при работе над интеллектуальными спасателями и чтобы конечный продукт вышел качественный со всех трёх, централизованных сторон.