







Инженеры из Массачусетского технологического института (MIT) разработали нового робота RF-Grasp. Он использует радиоволны, которые могут проходить сквозь стены, чтобы обнаруживать закрытые объекты.
В последние годы роботы получили искусственное зрение, осязание и даже обоняние. «Исследователи придают роботам человеческое восприятие — говорит доцент MIT Фадель Адиб. В новой статье команда Адиба продвигает технологию еще дальше — Мы пытаемся дать роботам сверхчеловеческое восприятие».
Исследователи разработали робота, который использует радиоволны. Их особенность в том, они проходят сквозь стены для обнаружения спрятанных объектов. Робот RF-Grasp сочетает в себе мощное зондирование с более традиционным компьютерным зрением для обнаружения и захвата предметов, которые в противном случае могли бы быть заблокированы для просмотра. Прогресс может однажды упростить электронную коммерцию на складах.
Исследование будет представлено в мае на Международной конференции IEEE по робототехнике и автоматизации. Ведущим автором статьи является Тара Борушаки, научная сотрудница группы кинетики сигналов в MIT Media Lab.
Сфера электронной коммерции продолжает расти, однако работа на складах по-прежнему обычно является прерогативой людей, а не роботов, несмотря на иногда опасные условия труда. Отчасти это связано с тем, что роботам сложно найти и схватить объекты в такой многолюдной среде. Восприятие и выбор — вот два препятствия в отрасли сегодня, объясняют ученые. Используя только оптическое зрение, роботы не могут заметить присутствие предмета, упакованного в коробку или спрятанного за другим предметом на полке. Дело в том, что видимые световые волны не проходят сквозь стены.
При создании робота использовались системы радиочастотной (RF) идентификации. Это способ автоматической идентификации объектов, в котором посредством радиосигналов считываются или записываются данные, хранящиеся в так называемых транспондерах, или RFID-метках.
Любая RFID-система состоит из считывающего устройства (считыватель, ридер или интеррогатор) и транспондера (он же RFID-метка, иногда также применяется термин RFID-тег).
RF-Grasp использует камеру и RF-ридер для поиска и захвата помеченных объектов, даже если они полностью закрыты для обзора камеры. Камера находится на запястье роботизированной руки, прикрепленной к корпусу. При этом, RF-считыватель не зависит от робота и передает информацию в алгоритм управления. Таким образом, он постоянно собирает как данные радиочастотного отслеживания, так и визуальную картину своего окружения.
Подробная конструкция робота описана в пресс-релизе Массачусетского технологического института.
Робоящера научили ползать по деревьям как настоящую рептилию
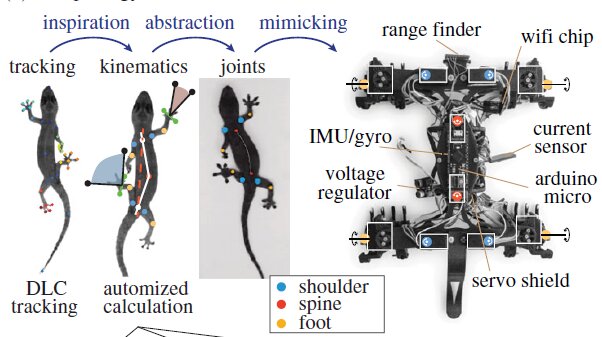
Ученые из австралийского университета Sunshine Coast создали робота, вдохновившись ящерицами. Рептилии оптимизировали передвижение по труднопроходимой местности за многие годы эволюции.
Робот-альпинист X-4, который двигается как рептилия, приближает инженеров к созданию робототехники следующего поколения для оказания помощи при бедствиях, удаленного наблюдения и, возможно, даже для исследования космоса.
Ведущий автор разработки Йоханна Шульц заявила: после четырех лет изучения движения ящериц и создания нескольких поколений конструкций роботов (X-4 — лишь последняя версия) команда пришла к выводу, что ящерицы усовершенствовали свой способ передвижения, оптимизировав передвижение по труднопроходимой местности за многие годы эволюции
«Лучшая конфигурация для лазящего робота оказалась именно той, которую использовали ящерицы. Эволюционировав, они нашли оптимальную походку для лазания», — объясняет Шульц.
Ключевым открытием стало то, что передние лапы ящерицы поворачиваются на 20 градусов, а задние лапы — на 100, несмотря на ожидания, что их зависимый от направления клеевой механизм (их когти или липкие подушечки у геккона) совпадет с направлением движения вверх по стволам деревьев. Ученые использовали это открытие и создали прототип робоящера, который научили ползать как настоящую рептилию.
Предоставлено: Шульц и др.
Изучение механизмов движения рептилий внесет вклад в оптимизацию робототехники. Зачастую инженеры делают акцент на улучшении основанного на искусственном интеллекте восприятия окружающей среды и автономии, а не движения и структуры машин.
«Понимая, какие параметры влияют на передвижение животного, можно определить, как должен робот должен выглядеть и двигаться в зависимости от требований и задач. Нужно ли ему быть сверхбыстрым, сверхстабильным или кем-то посередине», — заключает Шульц.
У ящероподобных роботов есть потенциал для поисково-спасательных операций и удаленных инспекций.
Робот-почтальон компании Panasonic
В городе Фудзисава префектуры Канагава компания Panasonic представила автоматически управляемого робота-почтальона, проведя тестовое испытание по доставке лекарственных средств из аптеки к дому. Компания ввести его в коммерческое использование в течение 2021 года, для чего необходим пересмотр Закона о дорожном движении. Съёмка проводилась 12 марта.
[Авторское право The Jiji Press, Ltd.]
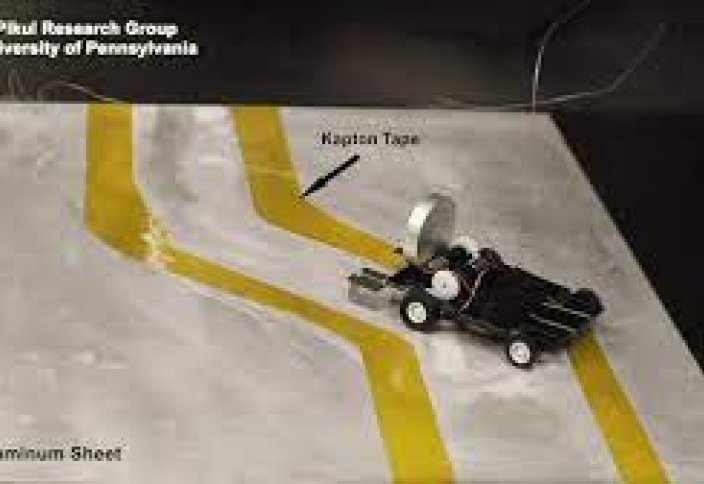
Робот-стрекоза легко скользит по воде и отслеживает её состояние
Полностью мягкий робот без электроники в форме стрекозы скользит по воде и реагирует на условия окружающей среды — такие как pH, температура или присутствие нефти.
Мягкие роботы — растущая тенденция в отрасли благодаря своей универсальности. Их детали могут работать с хрупкими предметами, например, с биологическими тканями. Обычно их могут повредить металлические или керамические компоненты роботов. Мягкие тела таких роботов позволяют им плавать или втискиваться в ограниченные пространства, где обычные машины могут легко застрять.
Ученые из Дьюкского университета разработали робота в форме стрекозы — DraBot. Он умеет собирать сведения о состоянии воды. Авторы разработки подчеркивают, что это пригодится при мониторинге экологической обстановки. Уникальный мягкий робот работает без электроники, а в его составе — самовосстанавливающийся гидрогель, который реагирует на изменение pH за считанные секунды. Им покрыты крылья робота-насекомого. Его форма имитирует стрекозу, поэтому устройство способно легко скользить по воде.
Длина тела робота всего 5,7 см. Оно оснащено микроканалами, по которым воздух подается в крылья и выводится в задней части устройства. Это позволяет роботу скользить по воде, как это делают стрекозы.
Детали разработки описаны в журнале Advanced Intelligent Systems.
Новый робот получил способность маневрировать против течения
Инженеры разработали аналог «боковой полосы» для роботов — новый орган позволяет ему оставаться на плаву даже против сильного течения
В исследовании приняли участие ученые из Института интеллектуальных систем Макса Планка (Германия), Сеульского национального университета и Гарвардского университета. Они создали робота с мягким телом, вдохновленного обычными рыбами, который мог плавать на месте против течения воды, проходящего через резервуар.
Волнообразные движения его тела стали возможными благодаря серии связанных силиконовых камер, расположенных по обе стороны корпуса. Воздух поочередно закачивался в камеры с одной стороны и выходил из камер с другой — это заставляло надутую сторону расширяться и выгибаться наружу, в то время как спущенная сторона закручивалась внутрь.
Система боковой линии робота состояла из двух силиконовых микроканалов, заполненных жидким металлом по всей длине каждой стороны. По мере того как каждый из этих каналов растягивался, в то время как эта сторона тела изгибалась, электрическое сопротивление жидкого металла внутри увеличивалось. Таким образом, отслеживая изменения сопротивления, можно было определить, как сильно конкретное давление воздуха заставляет тело робота колебаться.
Ученые приступили к созданию цикла самообучения, в котором компьютер, подключенный к роботу, измерял динамичную скорость течения воды, а затем автоматически регулировал давление воздуха в ответ на поступающую информацию. Это позволило роботу поддерживать постоянную скорость плавания, соответствующую скорости течения. В естественной среде, такой как река, это не позволит роботу быть унесенным течением.
«Новый робот позволит нам проверять и уточнять гипотезы, касающиеся нейромеханики плавающих животных, а также поможет улучшить будущих подводных роботов», — заявил доктор Ардиан Юсуфи из Макса Планка. «Помимо определения характеристик датчика мягкой деформации в динамических условиях под водой, мы впервые разработали простой и гибкий подход к моделированию на основе данных, чтобы спроектировать наш контроллер обратной связи во время плавании».
Робот адаптируется к поломкам, а если спотыкается, то учится на своих ошибках
Четвероногий робот Дайрет (Dyret) регулирует длину ног, чтобы приспособить тело к поверхности. Попутно он учится, как передвигаться лучше всего.
Имя Dyret (по-норвежски «животное») является аббревиатурой от Dynamic Robot for Embodied Testing — «Динамический робот для воплощенного тестирования».
«Мы продемонстрировали преимущества того, что робот может постоянно адаптировать форму своего тела. Наш робот доказывает, что это можно легко сделать с помощью современных технологий», — объясняет старший преподаватель Департамента информатики UiO Тоннес Найгаард.
В случае с Дайретом изменение формы тела означает, что он регулирует длину ног. Механизм адаптации формы тела оказался очень полезен для робота.
Ранее ученые показали, что их робот адаптируется к различным средам в контролируемых условиях в помещении. Затем Найгаард провел полгода с другими инженерами в Организации научных и промышленных исследований Содружества (CSIRO) в Австралии. Она специализируется на тестировании самообучающихся роботов на открытом воздухе.
«Раньше считалось, что этого слишком сложно достичь в реальном мире. С помощью роботов и наших экспериментов мы показали, что это возможно», — объясняет Найгаард в интервью Titan.uio.no. Результаты работы опубликованы в журнале Nature Machine Intelligence.
Изменяя длину своих ног, робот может автоматически менять и форму тела. Морфологически адаптивные роботы могут работать в непредсказуемой среде и решать новые задачи без необходимости переделывать сою структуру или перестраиваться каждый раз, когда они сталкиваются с чем-то неожиданным.
Для людей трудно представить, как трудно роботу переходить, например, от бетона к траве. Не стоит забывать, что у человека есть многолетний опыт и довольно много чувств по сравнению с роботом.
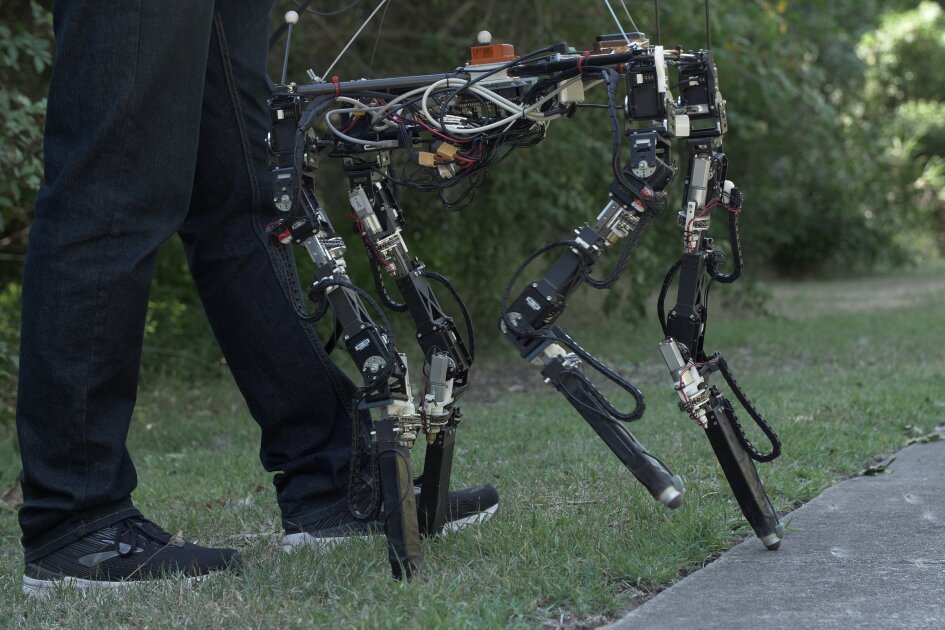
От травы к бетону: гигантский скачок для самообучающегося робота. Предоставлено: Tønnes Nygaard / UiO.
«Робот использует камеру, чтобы увидеть, насколько неровная местность, и датчики в ногах, чтобы определить, насколько жесткая поверхность для ходьбы, — объясняет Найгаард. — Дайрет постоянно узнает об окружающей среде, по которой он идет, и в сочетании со знаниями, полученными в помещении в контролируемой среде, использует это для адаптации своего тела».
Когда Дайрета попросили пройтись по траве, он никогда раньше не видел травы. Он тренировался только на гравии, песке и бетоне. Тем не менее, он быстро научился ходить по австралийской траве и какова была идеальная длина ног. Выяснилось, что более короткие ноги обеспечивают лучшую устойчивость роботу, в то время как более длинные — более высокую скорость ходьбы, если грунт достаточно предсказуем.
Плоский газон может быть не самой большой проблемой, но трава в природе полна пучков и ям, которые могут заманить в ловушку длинноногого робота, поэтому Дайрет укорачивает свои ноги. На бетоне он может их вытянуть и «убежать».
Робот также адаптируется к повреждениям при столкновении с непредвиденными препятствиями.
«Используя нашу технологию, робот может адаптироваться к тому, что одна из его ног становится слабее или ломается. Он может научиться восстанавливаться, хромая или уменьшая длину трех других ног», — говорит Найгаард. Обучаясь на своих ошибках и поломках, Дайрет лучше приспосабливается к окружающей среде.
Пока Дайрет не готов брать на себя серьезные задачи. Целью докторской степени Найгаарда было разработать технологию и найти подходящие материалы, а также доказать, что это возможно. Тем не менее, он видит несколько возможных применений в будущем. Например, робот пригодится при поисково-спасательных операциях, а также в сельском хозяйстве, где существует широкий спектр сложных поверхностей и погодных условий. Также Дайрет поможет при разведке шахт, куда людям трудно добраться.





